Book Summary: Memory Evolutive Systems
Framing complex systems in the language of category theory.
Want to get notified about new posts? Join the mailing list and follow on X/Twitter.
Memory Evolutive Systems: Hierarchy, Emergence, Cognition - Ehresmann and Vanbremeersch
Preliminaries: Categories and Functors
The “obvious” way to model a system is to use a graph, a collection of vertices and edges (ordered pairs of vertices) in which vertices represent system components and edges represent direct relations between the components.
However, system components can affect each other through indirect relationships: if $A$ affects $B$ and $B$ affects $C$, then $A$ may affect $C$ by transitivity. Such indirect relations are left implicit in conventional graph structure, which makes explicit only direct relationships. To study systems, we require a theory that reveals the transitivity that conventional graph theory hides.
E & V have been able to describe said transitivity (as well as hierarchy, emergence, and cognition) of real-world systems naturally in terms of category theory, an approach to mathematics that describes mathematical objects in terms of their relationships to other objects rather than their own specific makeup. They refer to their model as Memory Evolutive Systems (MES).
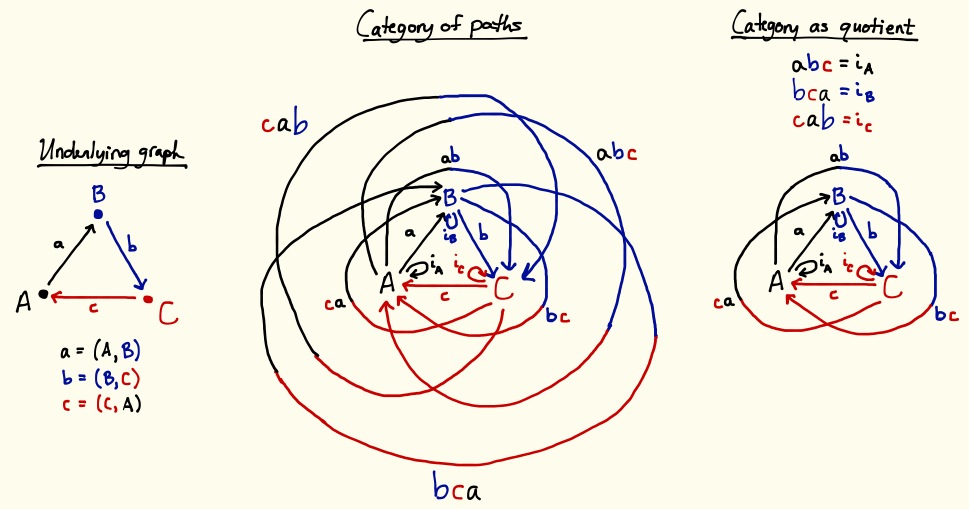
Given a graph, one generates its largest category, the category of paths, by referring to the vertices as objects and including all arrows that correspond to paths (sequences of distinct edges) in the graph. (Each path of length $0$ with respect to an object $X$ is reflected by an identity arrow $i_X$ which is a self-loop.) A category generated by an underlying graph is a quotient of the category of paths generated by the underlying graph.
In general, a system’s instantaneous state can be modeled by its configuration category, the category that has the system’s components as objects and their interactions as arrows.
State updates can be modeled as functors, structure-preserving maps between categories. More precisely, a functor $p_{10}: C_1 \leftarrow C_0$ to category $C_1$ from category $C_0$ must satisfy:
- If $x_{ij}$ and $x_{jk}$ are adjacent arrows of $C$, then $p_{10}(x_{ij}x_{jk}) \sim p_{10}(x_{ij})p_{10}(x_{jk})$. In other words, $p_{10}$ either maintains or collapses (but does not "tear") commutative triangles, and thus transforms commutative diagrams into commutative diagrams.
- If $X$ is an object of $C_0$, then $p(i_X) = i_{p_{10}(X)}$. That is, $p_{10}$ preserves identity arrows.
Per the above definition, functors can model the collapse of multiple objects into a single object, so that the single object becomes the sink (resp. source) of all arrows whose sink (resp. source) was originally one of the collapsed objects. However, functors cannot model the deletion of objects (in which all arrows whose sink or source was originally one of the collapsed objects is removed from the category). To model deletion one can use a partial functor, a restriction of a functor to a subcategory in its domain.
Patterns Represent Complex Objects
Real-life systems contain complex objects, groups of linked components that, when realized as a components in a larger system, bind together in a way that endows them with collective properties they would not individually display in isolation. How can we model complex objects in a configuration category? E & V notice that for such binding to occur, there must be a pattern in the links within a complex object that allow its inner objects to operate synergistically.
The simplest definition of a pattern would be a subgraph of the graph defined by a category (if we ignore the composition law and equivalence relations, a category can be viewed as a graph by viewing its objects as vertices and its arrows as edges). However, since individual objects may take on multiple roles within a complex object, this approach will not suffice.
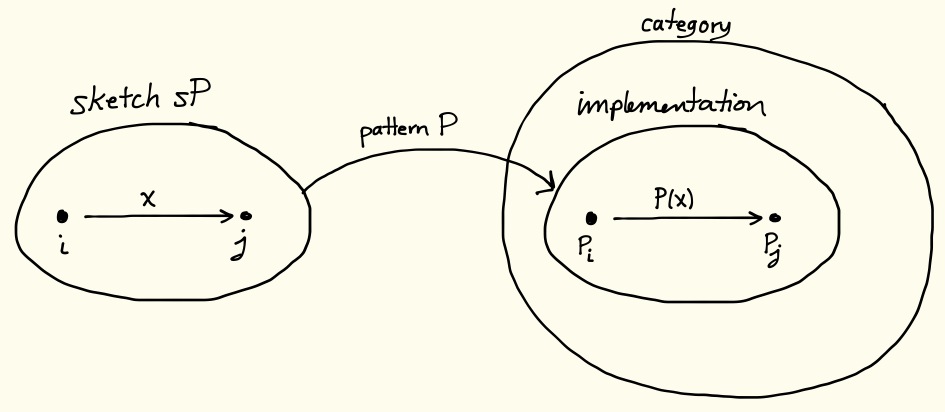
Rather, E & V define a pattern as a homomorphism $P$ that implements a graph $sP$ (called its sketch) in a category. (A homomorphism $P$ between graphs maps vertices and edges of its source to vertices and edges of its target such that for any edge $(i,j)$ in its source, we have $P(i,j)=(P(i), P(j))$). Each vertex $i$ of the sketch is called an index, whose implementation $P_i = P(i)$ is called a component of the pattern. The implementation $P(x): P_i \rightarrow P_j$ of each edge $x: i \rightarrow j$ of the sketch is called a distinguished link of the pattern.
From a modeling perspective, the indices and links of a sketch describe the of the roles that the inner components of a complex object must fulfill for the complex object to achieve a particular purpose, while the implementation describes specifically how these roles are fulfilled by the inner components of the complex object. Note that pattern components need not be distinct because a single component of the complex object may take on multiple roles (i.e. we may have $A = P_i = P_j$ for distinct indices $i,j$). Different patterns that have the same sketch represent different implementations of the same formal organization; we say that such patterns are analogous. However, in the case that the pattern implements distinct indices as distinct objects, the implementation reduces to a subgraph of the graph defined by the category.
Colimits Bind Patterns
We seek to model interactions between patterns and other patterns. Since other patterns consist of objects, we will first model interactions between patterns and individual objects. (From now on, we will use the word “pattern” to refer to both patterns and pattern implementations; the intended meaning will be clear from context.)
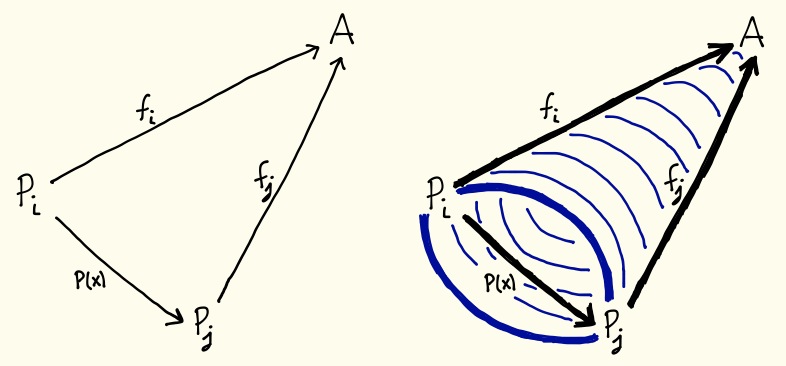
Although a pattern $P$ may consist of multiple objects, E & V seek to understand it as a single “higher-level” object whose operation on another object binds together the operations of $P$’s components on that object. To this end, we define a cone with basis $P$ and vertex $A$ as a family $(f_i)$ of individual links $f_i: P_i \rightarrow A$ such that $f_i = P(x)f_j$ for any arrow $x: i \rightarrow j$ in the sketch of $P$. In other words, $(f_i)$ consists of links such that the diagram below commutes. E & V often refer to the cone as a collective link from $P$ to $A$.
Distinguished links allow the components of a cone’s basis $P$ to operate synergistically on its vertex $A$. If $A$ operates on some other object $X$, then its operation incorporates full synergy of $P$; consequently, when thinking of $P$ as a “higher-level” object, we can view $P$’s operation on $X$ as $A$’s operation on $X$. If $A$ is unique and resides in the same category as $P$, we call it the colimit $cP$ of $P$. More precisely, a colimit of a pattern $P$ is object $cP$ in the category containing $P$ such that:
- There is a cone $(c_i)$, which we call the colimit-cone, with basis $P$ and vertex $cP$. (E & V often refer to colimit-cones as collective binding links and call each individual link $c_i$ the binding link associated to index $i$).
- If there is also a cone with basis $P$ and vertex $A$, then $A$ and $cP$ are isomorphic. (This is called a universal property because it ensures uniqueness, up to isomorphism).
If $cP$ exists, then the operations of $P$ (when viewed as a “higher-level” object) on an arbitrary object $X$ can be viewed as the operations of $cP$ on $X$. In other words, the colimit is a binding of a pattern into a single object with the same operative properties. For example, a social group is the colimit of an organism pattern, each organism the colimit of an organ pattern, each organ the colimit of a tissue pattern, each tissue the colimit of a cell pattern, each cell the colimit of a macromolecule pattern, each macromolecule the colimit of a molecule pattern, each molecule pattern the colimit of an atom pattern, and each atom the colimit of a particle pattern.
E & V note that by binding together, individuals lose some autonomy, but their cooperation may generate a collective benefit. This is analogous to the idea of coalitions in cooperative game theory. Moreover, note E & V, the colimit’s universal property means that it is the optimal implementation of the functional purpose of the pattern. Consequently, the existence and nature of a colimit depends on the characteristics of the category in which the pattern is implemented. This is consistent with the usefulness of optimization principles in modeling. Furthermore, E & V note that because the same colimit can arise from different patterns (i.e. it can have different decompositions), a colimit forgets the structural organization of the pattern and retains only its functional, operative role. This is consistent with our ability to build useful models e.g. of biological systems without incorporating quantum field theory into our models.
E & V also note that colimits highlight the dependence of a pattern’s emergent properties on its distinguished links. The colimit of a pattern that lacks distinguished links is called the sum or coproduct, and its properties reduce to those of its components without introducing any new emergent properties. Hence, classical reductionism fails to reveal all properties of a colimit unless it is a sum or a coproduct. Furthermore, we can see what properties classical reductionism fails to reveal by comparing the colimit of a pattern with the sum of the family of its components, when both exist: given a sum and a colimit corresponding to the same pattern, it can be proven that any link from the sum to an object can be factored into the composition of sum-to-colimit link and a colimit-to-object link. The sum-to-colimit link can be interpreted as a “symmetry-breaking” filter that models the information necessary to integrate the pattern into a complex object, and whose weight, or “strength,” can be determined if the category is labelled.
Patterns Interact via Clusters
E & V call an operation of an object $B$ on a pattern component $P_i$ an aspect of $B$ for $P$. However, to interpret $B$’s operation on the entirety of $P$, we must consider how aspects of $B$ interact with the distinguished links of $P$. To this end, we define a zigzag as a finite sequence of arrows in which any two consecutive arrows have one of their ends in common, and we define a perspective of $B$ for a $P$ as a maximal family of its aspects with respect to a zigzag of $P$’s distinguished links, such that the aspects and the zigzag commute. It may be helpful to think of a pattern as a brain whose pattern components, or sensory receptors, integrate information using zigzags. Then the aspects are sensory stimuli, and the perspectives depend on the zigzags by which the brain integrates those stimuli.
Perspectives represent operations of individual objects on entire patterns. E & V extend perspectives to clusters, which represent operations of entire patterns on entire patterns. Given two patterns $P$ and $Q$, E & V define a cluster from $Q$ to $P$ as a maximal set of aspects of the components of $Q$ for those of $P$, such that
- Each component $Q_i$ has aspect(s) in the cluster, all of which together form a perspective of $Q_i$ for $P$
- The composition of an aspect of the cluster with a distinguished link of $P$, or of a distinguished link of $Q$ with an aspect of the cluster, also belongs to the cluster.
Notice that, in the case that a pattern has a single object as its unique component, its outgoing clusters reduce to cones, and its incoming clusters reduce to perspectives. Furthermore, the definition allows one to form a composite cluster by composing links of successive clusters. This cluster composition is associative and admits an identity cluster that consists of all of a pattern’s distinguished links and their composites. This hints that clusters can be treated as arrows in a category whose objects are patterns.
Indeed, given a category $K$, E & V define $\mbox{Ind}K$ to be the category whose objects are the patterns in $K$, and whose arrows are the clusters between them. (Objects of $\mbox{Ind}K$ treat objects of $K$ as indices in patterns). Then $K$ is a subcategory of $\mbox{Ind}K$. Furthermore, any pattern $P$ in $K$ considered as a single-object pattern in $\mbox{Ind}K$ admits a colimit (namely, $P$ itself) in $\mbox{Ind}K$. Essentially, $\mbox{Ind}K$ extends $K$ into a category in which every pattern of $K$ admits a colimit.
Multifold Objects Cause Hierarchical Complexity
E & V call two patterns $P, P^{\circ}$ homologous if they have the same colimit $C = cP = cP^{\circ}$. Intuitively, homologous patterns are often structurally similar. For example, E & V say that a subpattern $R$ of $P$ is a representative subpattern of $P$ if the composites of the distinguished links of $P$ with those of $R$ form a cluster from $P$ to $R$, and they show that the colimits of $P$ and $R$ either are the same or do not exist. They note that representative subpatterns remind us of redundancy in biological systems, since the collective actions of $P$ are determined entirely by $R$, and the components of $P$ that are not in $R$ act automatically in synergy with those of $R$ without imposing additional constraints.
Homologous patterns are often (strongly) connected in the sense that there is a cluster from one to the other that binds into an (identity) isomorphism. In general, though, two decompositions of an object need not be connected. E & V call an object $C$ a multifold object if it admits at least two decompositions that are not connected, and they call the passage between any two disconnected decompositions a complex switch. The intuition is that different micro-states can lead to the same macro-equilibrium.
Given patterns $P$ and $Q$, E & V say that a link $cQ \rightarrow cP$ is (Q,P)-simple if it binds a cluster from $Q$ to $P$, and (Q,P)-complex if not. Complex links model emergent properties that depend on the total structure at the level of their components. Although the composition of simple links between non-multifold objects is itself simple, the composition of simple links between multifold objects is not guaranteed to be simple. For example, if $C$ is a multifold object admitting two nonconnected decompositions $P$ and $P^{\circ}$, and $g: cQ \rightarrow C$ is a $(Q,P)$-simple link, and $g’:C \rightarrow cQ’$ is $(P^{\circ},Q’)$-simple link, then their composite $gg’$ is $(Q,Q’)$-complex. As a concrete example, one can think of $Q$ as a manufacturer, $C$ as a middleman company whose purchasing department is $P$ and whose sales department is $P^{\circ}$, and $Q’$ as the consumers.
We will see that multifold objects allow complexity to arise in hierarchical systems, which are found throughout nature. E & V define a hierarchical category as a category $K$ of objects that are partitioned into a finite sequence of levels $0, …, N$ so that any object $C$ of level $n+1$ is the colimit of at least one pattern $P$ whose components are in the levels strictly below $n+1$. (A concrete example of a hierarchical category is a book, whose levels are letters, words, sentences, paragraphs, and chapters.) Noting that each component $P_i$ of $P$, provided $P_i$ is not in level $0$, must be the colimit of at least one pattern $P^i$ included in levels strictly lower than the level of $P_i$, E & V say that $(P,(P^i))$ is a ramification of length $2$ for $C$. Inductively, then, a ramification of length $1$ is a pattern admitting $C$ for a colimit, and a ramification $(P,(R^i))$ of length $k$ of $C$ consists of, for each component $P_i$ of $P$, a ramification $R^i$ of length $k-1$ of $P_i$. In general, a ramification of length $k$ of $C$ makes it possible to reconstruct $C$ in $k$ steps.
E & V show that for any ramification, if all distinguished links at intermediate levels are simple with respect to the patterns of the lower levels, then the iterated colimit can be reduced to a simple colimit of a large pattern having for components all the lowest components of the ramification. However, they note that such a reduction may not exist if certain distinguished links are complex. Hence, non-reducibility depends on the existence of multifold objects.
To model changes in natural systems, E & V show that given a category $K$ and a list $Op$ of objectives for modifying $K$ that may include any of
- adding new elements to $K$,
- eliminating existing elements in $K$ (eliminating a colimit amounts to dissociating a complex object), or
- binding patterns in $K$ (adding - or preserving, if it already exists - a colimit for each pattern),
a partial functor $p:K \rightarrow K’$ can be constructed so as to satisfy the following criteria:
- The objectives of $Op$ are realized in $K'$
- Homologous patterns that $Op$ requires bound are bound to the same colimit in $K'$
- $p$ satisfies the universal property that if $q:K \rightarrow K^*$ is another partial functor to a category $K^*$ such that (1) and (2) are satisfied, it factors in a unique way as $q = pq'$ where $q':K' \rightarrow K^*$ is a functor that preserves the colimits of patterns that are to be bound. Moreover, if $K$ allows multifold objects, then so does $K'$.
They call this the Complexification Theorem, and they call the resulting category $K’$ a complexification of $K$ for $Op$. The functor $p$ can be viewed as a “complexification process” because it results in the emergence of complex objects, namely those that bind a pattern initially without a colimit. (They also note that a partial functor can be constructed that satisfies the above with condition (2) removed.)
E & V also show that if $K$ allows multifold objects, then a sequence of complexifications of $K$ cannot be replaced by a single complexification of $K$ (they call this the Iterated Complexification Theorem). For a system to allow multifold objects, it means that two patterns of linked components may have independently the same operational behavior or actions, without direct communications between their components to coordinate these actions. A concrete example is the primary, secondary, tertiary, and quaternary structure of proteins.
A natural question is whether a hierarchical category can be constructed by a sequence of complexifications from level $0$. E & V call such categories based hierarchies, and they show that a hierarchical category is a based category if and only if each link either binds clusters between patterns in level $0$ or can be reconstructed in steps starting from level $0$ using only the operations of composition of links and binding of clusters.
Evolutive Systems as Fibrations
An evolutive system $K$ is described in terms of its associated fibration $FK$, a quasi-category consisting of objects $|K|$ which is generated by
- Configuration categories (fibres) $K_t$ such that
- The instants $t$ are objects of a category $T$ with a "before-or-simultaneous order," (e.g. an interval of finite subset of nonnegative real numbers)
- For each instant $t'>t$, there is a partial functor $k(t,t'):K_t \rightarrow K_{t'}$, called the transition from $t$ to $t'$, and these transitions commute.
- A category associated to the order of $T$ on $|K|$
The links $A_t \rightarrow B_t$ of (1) are called vertical links and the links $B_t \rightarrow B_{t’}$ of (2) are are called horizontal links. “Generated” means that all other links $A_t \rightarrow B_{t’}$ of $FK$, called transverse links, are composites of horizontal and vertical links.
A component of $K$ is a family $A = (A_t)$ of objects (its configurations) $A_t$ in $K_t$ indexed by a subset $T_A \subset T$ and linked by horizontal links; a link $g:A \rightarrow B$ between components of $K$ is a family $g = (g_t)$ of vertical links (its configurations) $g_t: A_t \rightarrow B_t$. ($FK$ is a category, i.e. every path has a composite, if there is no disappearance of links between components without disappearance of at least one such component). A pattern in $K$ is a graph of objects and links in $K$; it can be realized as a family $P = (P_t)$ of patterns $P_t$ in $K_t$ indexed by a subset $T_P \subset T$. The colimit of $P$, if it exists, is a component $cP = (cP_t)$ such that each $cP_t$ is the colimit of $P_t$.
E & V define an evolutive subsystem of $K$ as an evolutive system $L$ such that its timescale $S$ is contained in $T$, its configuration category $L_s$ is a subcategory of $K_s$ for each instant $s \in S$, and its transitions are restrictions of those of $K$. They also define an evolutive functor $p:K \rightarrow K’$ between evolutive systems $K$ and $K’$ as a family $(p_t)$ of functions $p_t: K_t \rightarrow K_t’$ indexed by $T$ such that $p_t k(t,t’) = k’(t,t’) p_{t’}$ for all instants $t,t’ \in T$.
Memory Evolutive Systems
An ES is a hierarchical ES (HES) if all of its configuration categories are hierarchical and if its transitions preserve levels. A memory evolutive system (MES) is a HES $K$ over a timescale $T$ such that $K$ includes:
- memory: A hierarchical evolutive subsystem (whose components are called records) also having timescale $T$
- coregulators (CRs): Evolutive subsystems (whose components are called agents) each having its own discrete timescale contained in $T$, and to each assigned a collection of records called its admissible procedures, which the CR use to (usually periodically) achieve a specific function in $3$ consecutive timesteps:
- internal observation: the CR's agents act as a short-term working memory by encoding the CR's landscape, the category that has the CR's perspectives as objects and their correlating links as arrows.
- regulation: the CR forms a list of objectives and selects an admissible procedure to achieve them.
- control function: the CR forms a (possibly partial) comparison functor between its anticipated landscape (the complexification of its landscape with respect to the list of objectives) and the actual landscape at this time.
The comparison functor in (c) is an isomorphism if all the objectives of the procedure in (b) are realized; however, the comparison functor need not be an isomorphism. While a CR’s anticipated landscape is constructed vial the CR’s procedure alone, the actual landscape is the result of the collective action of the procedures of all the CRs, called the operating procedure. If conflict occurs between simultaneous procedures, the operating procedure will be the result of an equilibration process (e.g. weighted averaging). In this case, the comparison functor indicates errors and is not an isomorphism.
If the comparison functor cannot be formed, the CR is said to have a fracture. Fractures are reminiscent of bifurcations and catastrophes; dyschrony in a CR occurs if several of its successive steps are interrupted by a fracture, and dyschrony risks being propagated to other parts of the system.
Application: Fractures and Aging
Fractures can occur for a multitude of reasons, but most often they are due to failure to satisfy a CR’s temporal constraints, which we describe next. Let
- $\pi(t)$ denote the CR's time lag at $t$, the maximum of the propagation delays at $t$ of links between the CR's agents and links coming from the CR's admissible procedures. (The propagation delay of a link is a labelling such that the configuration categories are labeled in the additive monoid of nonnegative real numbers, and the propagation delay is constant over an episode of presence of a link, i.e. a maximal interval $I \subset T$ such that the link is present for all $s \in I$).
- $d(t)$ denote the CR's period at $t$, the average (over times preceding $t$) length of time it takes for the CR to achieve its $3$ steps
- $z(t)$ denote the minimum stability span (defined below) of the components intervening in the actual landscape and the selected procedure.
The stability span of a level-($n+1$) component $A$ at $t$ i the largest $e(t)$ such that in the category (fiber) $K_t$ there is a pattern $Q_t$ of levels no higher than $n$ whose colimit is $A_t$, and such that for any $t < t’ < t + e(t)$ its new configuration $Q_{t’}$ has colimit $A_{t’}$. In other words, the stability span at $t$ is the largest duration during which there remains a core of the components of $A$ at $t$ that suffice to maintain its organization.
Complex objects (e.g. nations) tend to acquire their own identity because they keep their performance in spite of modifications to their organization; this is possible due to continual “sliding” of the stability span. Organizations are modified gradually, and each time their organization is modified, there is a new stability span that partially covers the old stability span but extends beyond the previous stability span. For example, if letters of a sentence are randomly changed at a rate of $1$ per second, for a few second (its stability span), the difference is small enough for it to (in practice) retain its meaning. It is easy to see that under this letter-changing operation, the stability span increases as we climb the hierarchy from words to sentences to paragraphs to chapters to entire books.
For a CR to function properly, it must at all times satisfy the temporal constraint
or equivalently
Desynchronization occurs when the temporal constraints are at risk of being violated; in response, $d$ is often modified to achieve resynchronization. However, resynchronizations can cause desynchronizations in other CRs, leading to cascades of resychronization that affect higher and higher levels (timescales are more sparse up the hierarchy, and accumulated effects of changes in a micro-CR, a CR with relatively small period, may modify a macro-CR, a CR with relatively large period). In the developmental process, resynchronization reduces periods; in the aging process, resynchronization increases periods.
E & V propose that aging is due to a cascade of resynchronizations of CRs at increasingly higher levels, to compensate for progressive decreases in $\frac{z}{\pi}$ at lower levels. Their theory describes the essence of many biological theories of aging.
Want to get notified about new posts? Join the mailing list and follow on X/Twitter.